Appendix A - Virtual environments
This appendix provides a brief introduction to implementing virtual environments in Jason, including environment actions.
Getting started
Create a new Jason project in Eclipse called appendix_a.
Step 1 - Environment class
Every Jason project includes a virtual environment that is shared by all agents in the project. The default environment in Jason is empty and includes no environment actions so it plays no role in an execution of the project. To interact with the virtual environment from your agent files (e.g. using environment actions) you must extend the particular Java class in Jason that implements the default virtual environment. Extending this class gives you a custom virtual environment where you can implement shared environmental observations and environment actions.
With the src/java directory in the Jason project highlighted in Eclipse select File > New > Class.
Enter MyEnvironment in the Name field.
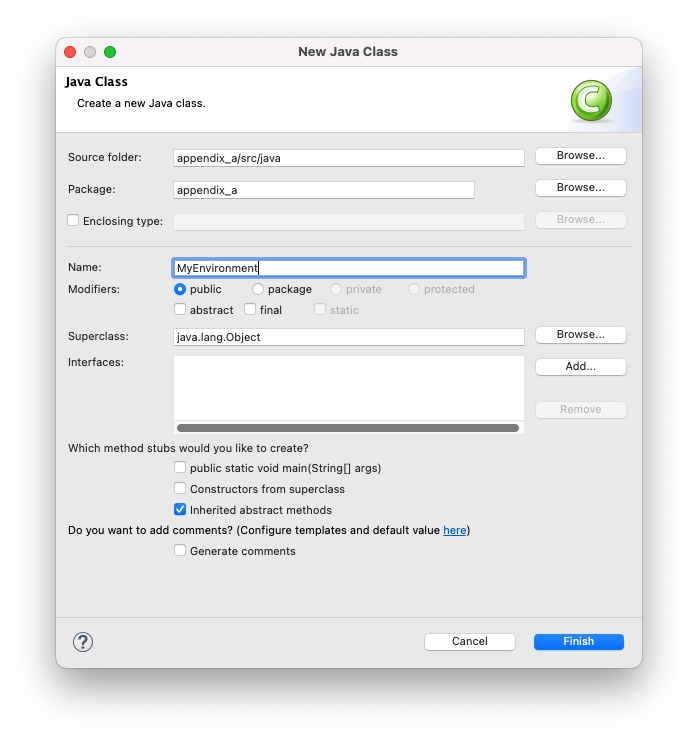
Select Finish.
A new Java file should be automatically created at src/java/appendix_a/MyEnvironment.java. Edit the file as follows:
package appendix_a;
import jason.environment.Environment;
public class MyEnvironment extends Environment {
}
This Java class is where we will later implement shared observations and environment actions.
Step 2 - Source percept annotations
We have seen in Tutorial 4 that Jason automatically annotates beliefs and goals with source(self) if they originate from the agent itself, or with source(agent)if they originate from another agent (called agent) following its execution of a Jason communication action. The third and final annotation applied automatically by Jason is source(percept), which is applied to all beliefs that originate from the environment. Such beliefs may be referred to simply as percepts.
Create a new agent file called environment_agent.asl:
/* Initial beliefs and rules */
/* Initial goals */
/* Plans */
+weather(Attribute, Value)[source(self)] : true <- .print("I believe the ", Attribute, " is ", Value).
+weather(Attribute, Value)[source(percept)] : true <- .print("I observe the ", Attribute, " is ", Value).
Notice the important role of source(X) annotations when implementing agent files that integrate with a custom virtual environment. In this example both plans relate to belief addition events of the form +weather(Attribute, Value) but the first plan is only relevant when the event originates from the agent itself (source(self)) while the second plan is only relevant when the event originates from the environment (source(percept)). This demonstrates that Jason allows us to to implement agent files that distinguish between beliefs and observations.
Step 3 - Jason configuration file
With a custom environment class implemented, the final step is to tell Jason to instantiate the virtual environment from this Java class by adding an environment option to the Jason configuration file that points to the new class.
Edit the Jason configuration file as follows:
MAS appendix {
infrastructure: Centralised
environment: appendix_a.MyEnvironment
agents:
alice environment_agent [beliefs="weather(temperature, cold)"];
bob environment_agent;
aslSourcePath:
"src/asl";
}
The line environment: appendix.MyEnvironment tells Jason to instantiate the virtual environment from the new Java class MyEnvironment included in the appendix_a package of the Jason project.
Run the Jason project.
[alice] I believe the temperature is cold
The new custom environment is working but is currently no different from the default virtual environment. For a meaningful virtual environments we need to implement shared initial percepts and/or environment actions.
Initial percepts
Initial percepts are implemented in Jason by overriding the Environment.init(...) method included in the default virtual environment. Jason provides lots of functionality that can be used within this new method but most commonly you will add percepts using the Environment.addPercept(...) method. In practice this is much like defining initial base beliefs in the agent file, except it is achieved using Java code.
Step 4 - Agent percepts
Initial percepts can be defined individually for each agent using Environment.addPercept(agentName, literal) where agentName is a string representing the name of an agent in the Jason project and literal is a Jason Literal object representing the percept to be added.
Note: A Jason
Literalobject can be conveniently parsed from a string usingASSyntax.parseLiteral(...). This method may throw aParseExceptionwhich you will need to catch yourself.
Edit MyEnvironment.java as follows:
package appendix_a;
import jason.asSyntax.ASSyntax;
import jason.asSyntax.parser.ParseException;
import jason.environment.Environment;
public class MyEnvironment extends Environment {
@Override
public void init(String[] args) {
try {
this.addPercept("bob", ASSyntax.parseLiteral("weather(temperature, cold)"));
} catch (ParseException e) {
e.printStackTrace();
}
}
}
Run the Jason project.
[alice] I believe the temperature is cold
[bob] I observe the temperature is cold
Referring back to the original agent file we can see that bob has selected the plan with triggering event +weather(Attribute, Value)[source(percept)] to respond to this initial percept. The percept was thus added to the belief base of bob and annotated with source(percept) but otherwise handled as a standard belief addition event.
Step 5 - Shared percepts
Shared initial percepts can also be defined for all agents using Environment.addPercept(literal) where literal is as before and there is no agentName parameter.
Add the following line to MyEnvironment.java below the existing Environment.addPercept(...) line:
this.addPercept(ASSyntax.parseLiteral("weather(cloud_cover, sunny)"));
Run the Jason project.
[alice] I believe the temperature is cold
[bob] I observe the temperature is cold
[alice] I observe the cloud_cover is sunny
[bob] I observe the cloud_cover is sunny
This method simply adds the percept to the belief base of every agent in the Jason project.
Environment actions
Environment actions are implemented in Jason by overriding Environment.executeAction(agentName, environmentAction) within the custom environment class. Environment actions can then be executed within plan bodies much like standard internal actions, with the only syntactic difference being that they do not start with . (full stop).
Step 6 - Execution
Edit environment_agent.asl as follows:
/* Initial beliefs and rules */
/* Initial goals */
!go_to(class).
/* Plans */
+weather(Attribute, Value)[source(self)] : true <- .print("I believe the ", Attribute, " is ", Value).
+weather(Attribute, Value)[source(percept)] : true <- .print("I observe the ", Attribute, " is ", Value).
+!go_to(Destination) :
weather(cloud_cover, sunny) & not weather(temperature, cold) <-
?location(Agent, Location);
.wait(1000);
walk(Location, Destination).
+!go_to(Destination) :
.my_name(Agent) <-
?location(Agent, Location);
.wait(1000);
drive(Location, Destination).
+location(Agent, Location) : .my_name(Agent) <- .print("I am at ", Location).
In this example walk(Location, Destination) and drive(Location, Destination) are environment actions whereas .wait(1000) is a standard internal action. In each case variables Location and Destination must be instantiated before the action is executed.
Suppose alice executes environment action walk(home, class). Jason will automatically trigger Environment.executeAction(agentName, environmentAction) such that agentName = "alice" and environmentAction is a Jason Structure object representing walk(home, class).
Since the same method is called for all environment actions, it is necessary to inspect the Structure object within this method in order to determine what environment action has actually be executed. This can be achieved using the Structure.getFunctor() and Structure.getTerms() methods.
Edit MyEnvironment.java as follows:
package appendix_a;
import jason.asSyntax.ASSyntax;
import jason.asSyntax.Structure;
import jason.asSyntax.parser.ParseException;
import jason.environment.Environment;
public class MyEnvironment extends Environment {
@Override
public void init(String[] args) {
try {
this.addPercept("bob", ASSyntax.parseLiteral("weather(temperature, cold)"));
this.addPercept(ASSyntax.parseLiteral("weather(cloud_cover, sunny)"));
this.addPercept(ASSyntax.parseLiteral("location(alice, home)"));
this.addPercept(ASSyntax.parseLiteral("location(bob, work)"));
} catch (ParseException e) {
e.printStackTrace();
}
}
@Override
public boolean executeAction(String agentName, Structure environmentAction) {
System.out.println("> " + agentName + " is executing functor " + environmentAction.getFunctor() + " applied to terms " + environmentAction.getTerms());
return true;
}
}
If Environment.executeAction(agentName, environmentAction) is called such that environmentAction is a Jason Structure object representing walk(home, class), then environmentAction.getFunctor() will return the string walk and environmentAction.getTerms() will return a list of Term objects containing home and class.
Notice that the method Environment.executeAction(...) must return a Boolean value where true indicates that the environment action succeeded and false indicates that it failed. In this example the action always succeeds.
Edit the Jason configuration file as follows:
MAS appendix_a {
infrastructure: Centralised
environment: appendix_a.MyEnvironment
agents:
alice environment_agent;
bob environment_agent;
aslSourcePath:
"src/asl";
}
Run the Jason project.
[alice] I am at home
[bob] I am at work
[bob] I observe the temperature is cold
[bob] I observe the cloud_cover is sunny
[alice] I observe the cloud_cover is sunny
> bob is executing functor drive applied to terms [work, class]
> alice is executing functor walk applied to terms [home, class]
Here we see that alice executed environment action walk(home, class) because she observed she was at home and that it was sunny, but did not believe it was cold. Conversely, bob executed environment action drive(work, class) because he observed he was at home and that it was cold.
Step 7 - Effects
The significance of environment actions is that they affect changes to the environment, which is shared by all agents. This means that the execution of an environment action by one agent may affect other agents, not just itself.
In Jason the effects of actions are implemented, for the most part, by adding and removing percepts from within the Environment.executeAction(...) method. Percepts can be added as before using Environment.addPercept(...), and removed using its corresponding method Environment.removePercept(...). Most of the implementation effort is to determine what percepts should be added or removed, and when.
Edit MyEnvironment.java as follows:
package appendix_a;
import jason.asSyntax.ASSyntax;
import jason.asSyntax.Structure;
import jason.asSyntax.parser.ParseException;
import jason.environment.Environment;
public class MyEnvironment extends Environment {
@Override
public void init(String[] args) {
try {
this.addPercept("bob", ASSyntax.parseLiteral("weather(temperature, cold)"));
this.addPercept(ASSyntax.parseLiteral("weather(cloud_cover, sunny)"));
this.addPercept(ASSyntax.parseLiteral("location(alice, home)"));
this.addPercept(ASSyntax.parseLiteral("location(bob, work)"));
} catch (ParseException e) {
e.printStackTrace();
}
}
@Override
public boolean executeAction(String agentName, Structure environmentAction) {
try {
String functor = environmentAction.getFunctor();
if ( ( functor.equals("walk") || functor.equals("drive") ) && environmentAction.getArity() == 2 ) {
System.out.println("> " + agentName + " is executing environment action " + environmentAction);
this.removePercept(ASSyntax.parseLiteral("location(" + agentName + ", " + environmentAction.getTerm(0) + ")"));
this.addPercept(ASSyntax.parseLiteral("location(" + agentName + ", " + environmentAction.getTerm(1) + ")"));
return true;
} else {
System.err.println("> " + agentName + " is attempting to execute unknown environment action " + environmentAction);
return false;
}
} catch (ParseException e) {
e.printStackTrace();
return false;
}
}
}
This example implements support for two environment actions walk/2 and drive/2. In both cases the action effect is the same: if walk(X, Y) or drive(X, Y) is executed then location(agent, X) will be deleted as a shared percept and location(agent, Y) will be added, with agent the name of the agent who executed the action. If the method is called with any action other than walk/2 or drive/2 then the method will return false indicating that the action has failed (because no such action is defined).
Run the Jason project.
[alice] I am at home
[bob] I am at work
[alice] I observe the cloud_cover is sunny
[bob] I observe the temperature is cold
[bob] I observe the cloud_cover is sunny
> bob is executing environment action drive(work,class)
> alice is executing environment action walk(home,class)
[bob] I am at class
[alice] I am at class
Here we see that that the effects of walk/2 and drive/2 have been applied correctly. For example, alice was initially at home, she executed walk(home, class), which caused her to arrive at class.
Step 8 - Consistency
According to the previous example if alice were to execute walk(home, class) while she was at work rather than at home, then location(alice, class) would still be added as a shared percept.
Note: An attempt would also be made to delete
location(alice, work)as a shared percept, but this attempt would silently fail because that percept did not exist.
It is your responsibility as Jason programmer to maintain consistency of your environment actions.
Edit the first +!go_to plan in environment_agent.asl as follows:
+!go_to(Destination) :
weather(cloud_cover, sunny) & not weather(temperature, cold) <-
.wait(1000);
walk(work, Destination).
According to this plan if it is sunny and not cold then the agent will attempt to walk from work to its destination, regardless whether it it currently at work or not.
Edit MyEnvironment.java as follows:
package appendix_a;
import jason.asSyntax.ASSyntax;
import jason.asSyntax.Literal;
import jason.asSyntax.Structure;
import jason.asSyntax.parser.ParseException;
import jason.environment.Environment;
public class MyEnvironment extends Environment {
@Override
public void init(String[] args) {
try {
this.addPercept("bob", ASSyntax.parseLiteral("weather(temperature, cold)"));
this.addPercept(ASSyntax.parseLiteral("weather(cloud_cover, sunny)"));
this.addPercept(ASSyntax.parseLiteral("location(alice, home)"));
this.addPercept(ASSyntax.parseLiteral("location(bob, work)"));
} catch (ParseException e) {
e.printStackTrace();
}
}
@Override
public boolean executeAction(String agentName, Structure environmentAction) {
System.out.println(this.consultPercepts(agentName));
try {
String functor = environmentAction.getFunctor();
if ( ( functor.equals("walk") || functor.equals("drive") ) && environmentAction.getArity() == 2 ) {
System.out.println("> " + agentName + " is executing environment action " + environmentAction);
System.out.println(this.consultPercepts(agentName));
Literal locationBefore = ASSyntax.parseLiteral("location(" + agentName + ", " + environmentAction.getTerm(0) + ")");
if (!this.consultPercepts(agentName).contains(locationBefore)) {
return false;
}
this.removePercept(locationBefore);
this.addPercept(ASSyntax.parseLiteral("location(" + agentName + ", " + environmentAction.getTerm(1) + ")"));
return true;
} else {
System.err.println("> " + agentName + " is attempting to execute unknown environment action " + environmentAction);
return false;
}
} catch (ParseException e) {
e.printStackTrace();
return false;
}
}
}
The method Environment.consultPercepts(...) returns the current list of percepts for an agent, which can then be used to implement preconditions for environment actions. According to this example if an agent called agent attempts to execute walk(X, Y) or drive(X, Y) but location(agent, X) is not in the current list of percepts, then the method will return false meaning that the action has failed.
Run the Jason project.
[bob] I am at work
[alice] I am at home
[bob] I observe the temperature is cold
[alice] I observe the cloud_cover is sunny
[bob] I observe the cloud_cover is sunny
> bob is executing environment action drive(work,class)
> alice is executing environment action walk(work,class)
[bob] I am at class
[alice] No failure event was generated for +!go_to(class)[code(walk(work,class)),code_line(16),code_src("file:src/asl/environment_agent.asl"),error(action_failed),error_msg(""),source(self)]
intention 1:
+!go_to(class)[source(self)] <- ... walk(work,Destination) / {Destination=class}
Here we see that the plan failed because alice attempted to execute walk(work, class) when she was at home.
Undo the change to the first +!go_to plan in environment_agent.asl, i.e.:
+!go_to(Destination) :
weather(cloud_cover, sunny) & not weather(temperature, cold) <-
?location(Agent, Location);
.wait(1000);
walk(Location, Destination).
Run the Jason project.
[alice] I am at home
[bob] I am at work
[alice] I observe the cloud_cover is sunny
[bob] I observe the temperature is cold
[bob] I observe the cloud_cover is sunny
> bob is executing environment action drive(work,class)
> alice is executing environment action walk(home,class)
[bob] I am at class
[alice] I am at class
Here we see that the plans succeed as long as the executed environment actions satisfy the preconditions implemented in Environment.executeAction(...).
Step 9 - Environment state
In the previous examples all information needed to determine the effects on an environment action were embedded in the action itself (e.g. by the variables Location and Destination). However, MyEnvironment is just a standard Java class so you are free to use whatever internal data structures you wish.
Suppose each agent has an energy level and the two environment actions walk/2 and drive/2 have secondary effects of consuming energy. We assume that walk/2 consumes three units of energy and drive/2 consumes one unit. All agents start with five units of energy.
Edit MyEnvironment.java as follows:
package appendix_a;
import java.util.HashMap;
import java.util.Map;
import jason.asSyntax.ASSyntax;
import jason.asSyntax.Literal;
import jason.asSyntax.Structure;
import jason.asSyntax.parser.ParseException;
import jason.environment.Environment;
public class MyEnvironment extends Environment {
int DEFAULT_ENERGY = 5;
Map<String, Integer> energy;
@Override
public void init(String[] args) {
try {
this.addPercept("bob", ASSyntax.parseLiteral("weather(temperature, cold)"));
this.addPercept(ASSyntax.parseLiteral("weather(cloud_cover, sunny)"));
this.addPercept(ASSyntax.parseLiteral("location(alice, home)"));
this.addPercept(ASSyntax.parseLiteral("location(bob, work)"));
this.addPercept(ASSyntax.parseLiteral("energy(" + DEFAULT_ENERGY + ")"));
energy = new HashMap<String, Integer>();
} catch (ParseException e) {
e.printStackTrace();
}
}
@Override
public boolean executeAction(String agentName, Structure environmentAction) {
try {
String functor = environmentAction.getFunctor();
if ( ( functor.equals("walk") || functor.equals("drive") ) && environmentAction.getArity() == 2 ) {
System.out.println("> " + agentName + " is executing environment action " + environmentAction);
Literal locationBefore = ASSyntax.parseLiteral("location(" + agentName + ", " + environmentAction.getTerm(0) + ")");
if (!this.consultPercepts(agentName).contains(locationBefore)) {
return false;
}
int energyBefore = energy.getOrDefault(agentName, DEFAULT_ENERGY);
this.removePercept(locationBefore);
this.removePercept(agentName, ASSyntax.parseLiteral("energy(" + energyBefore + ")"));
int energyCost;
if (functor.equals("walk")) {
energyCost = 3;
} else {
energyCost = 1;
}
int energyAfter = energyBefore - energyCost;
energy.put(agentName, energyAfter);
this.addPercept(ASSyntax.parseLiteral("location(" + agentName + ", " + environmentAction.getTerm(1) + ")"));
this.addPercept(agentName, ASSyntax.parseLiteral("energy(" + energyAfter + ")"));
return true;
} else {
System.err.println("> " + agentName + " is attempting to execute unknown environment action " + environmentAction);
return false;
}
} catch (ParseException e) {
e.printStackTrace();
return false;
}
}
}
The internal data structure energy is just a mapping from agent names to energy levels that we use to track the energy level of each agent during execution of the Jason project. If an agent executes either environment action then energy is updated within the Environment.executeAction(...) method according to the new energy level.
When either environment action is executed by an agent called agent in this example, then a percept of the form energy(X) is added to the belief base of agent. This means that each agent can observe its own energy level but not the energy level of other agents. We could likewise choose to hide this information from the agent itself (i.e. by not adding the percept) and the environment would still continue to track energy levels as before.
Add the following plan to the bottom of environment_agent.asl:
+energy(Value) : true <- .print("my energy is ", Value).
Run the Jason project.
[alice] my energy is 5
[bob] my energy is 5
[alice] I am at home
[bob] I am at work
[alice] I observe the cloud_cover is sunny
[bob] I observe the temperature is cold
[bob] I observe the cloud_cover is sunny
> alice is executing environment action walk(home,class)
> bob is executing environment action drive(work,class)
[alice] my energy is 2
[alice] I am at class
[bob] I am at class
[bob] my energy is 4
Here we see that the energy level for alice is 2 after she executes environment action walk(home,class), while the energy level for bob is 4 after he executes environment action drive(work,class).
Conclusion
In this appendix we have seen how to implement virtual environments in Jason by extending the Environment Java class that implements the default virtual environment. In particular, the Environment.init(...) method is used to implement initial percepts and the Environment.executeAction(...) method is used to implement environment actions.